Garbage collection module
Purpose of the module
Sensors are installed in the containers, signaling to the Pilot platform that the container is full to the sensor level. The sensor is installed at a height of about 80% of the full tank, so that there is still time for the garbage collector to arrive.
The operator of a waste removal company sees on the Pilot platform in real time information that the occupancy of several garbage containers is approaching the upper mark and creates a task to build an optimal route to collect these overflowing containers earlier.
The garbage truck driver receives a task in the application about the need to pick up certain containers and the optimal route to them.
The operator sees the task being completed online in real time.
In the event of an emergency, such as a fire in a dumpster, the operator also receives a notification on the Pilot platform (as well as via SMS, push or email, depending on the method convenient for him) about the incident and the need to respond. Moreover, on the Pilot platform, you can pre-set a scenario for responding to emergency situations (a fire in a garbage can, an accident with a garbage truck, a car leaving the route) and then any operator of a garbage collection service company will know what to do if a particular situation occurs .
This module does not have a separate icon and its operation consists of two connected modules, these are the Logistics Module and the PTM Module.
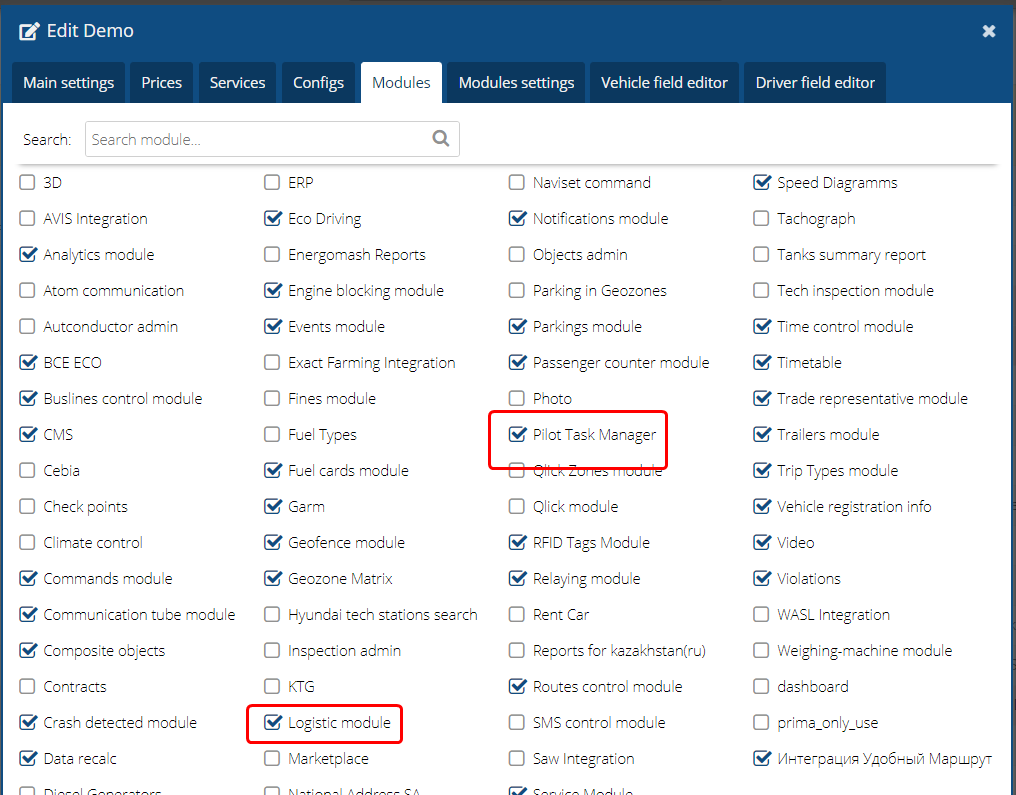
The module works with one of these Modules, but it is recommended to use two of the above modules simultaneously.
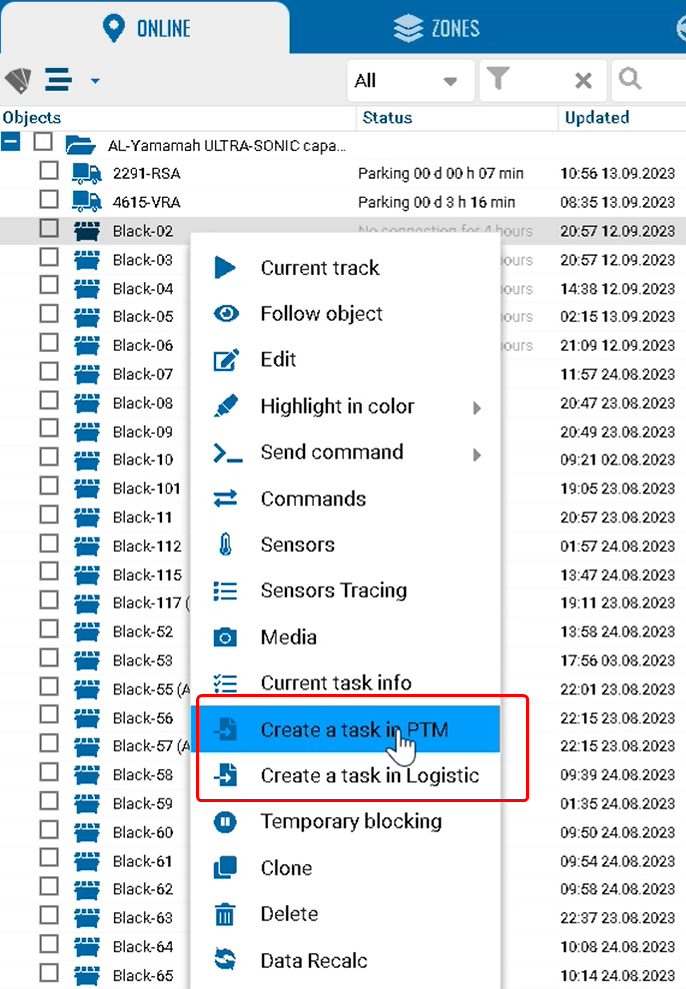
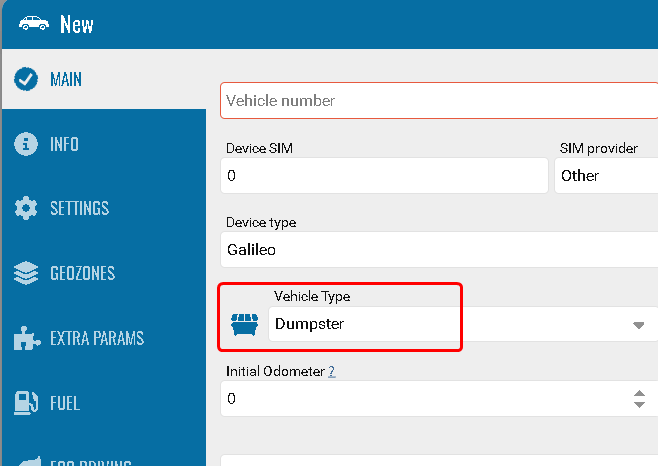
The module settings are displayed in the context menu only with the Dumpster type.
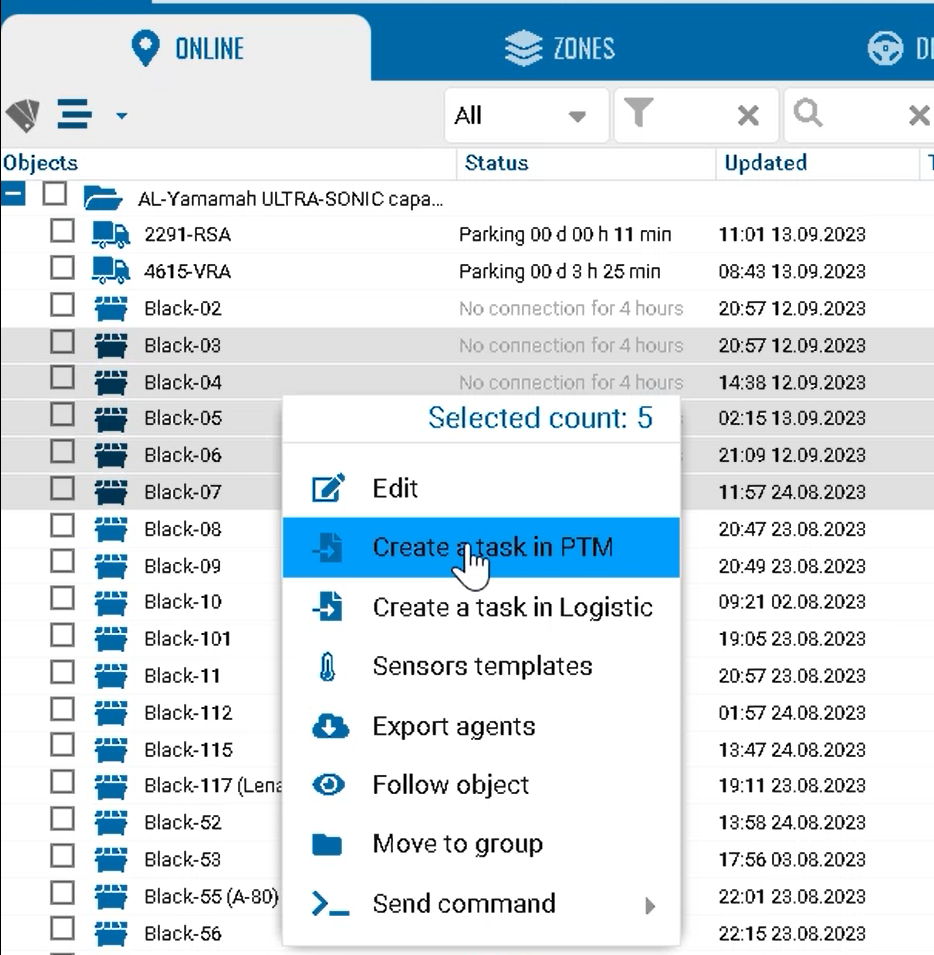
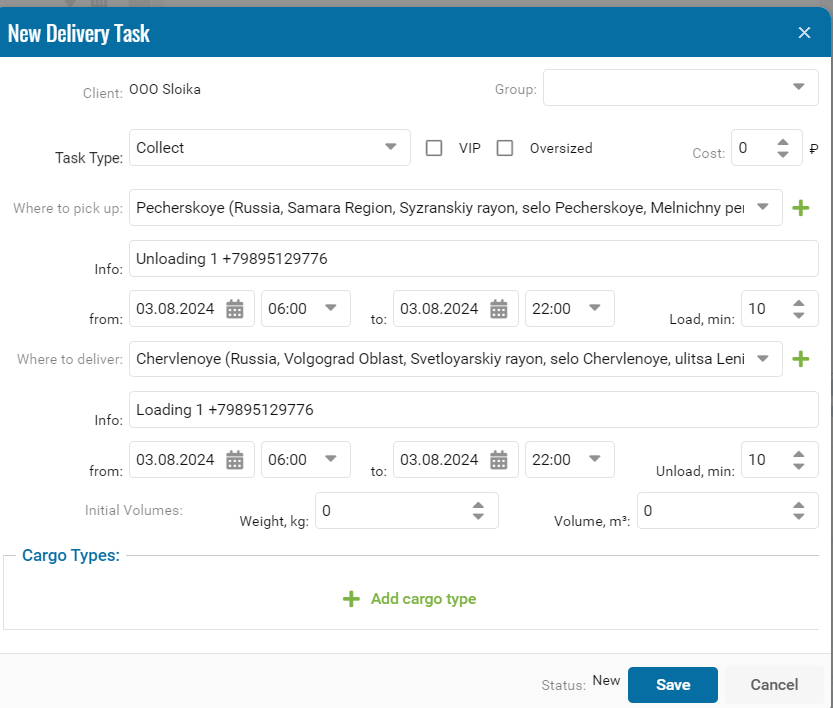
Create a task for PTM.
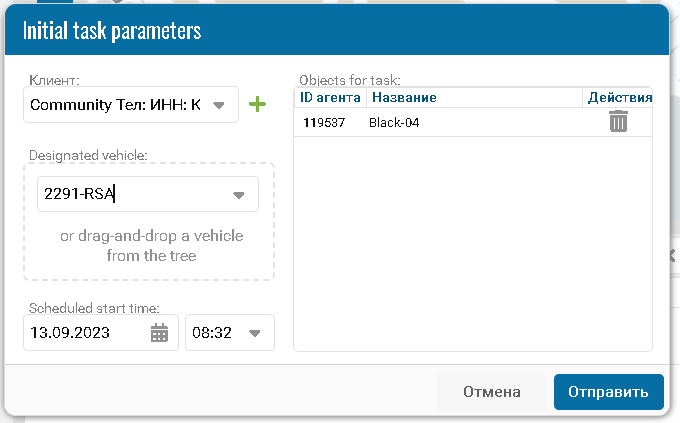
In order to create a task, you must select Create a task in PTM.
You only need to create garbage collection jobs from the context menu of the garbage can object.
When the Logistics module is connected, the Client's name will be available.
By default, the current time is set, which can be changed, for example, to a future period.
The specified planned time will be taken into account when completing the task.
If you want to select a larger number of tanks per car, you should select the first and last container and hold down shift.
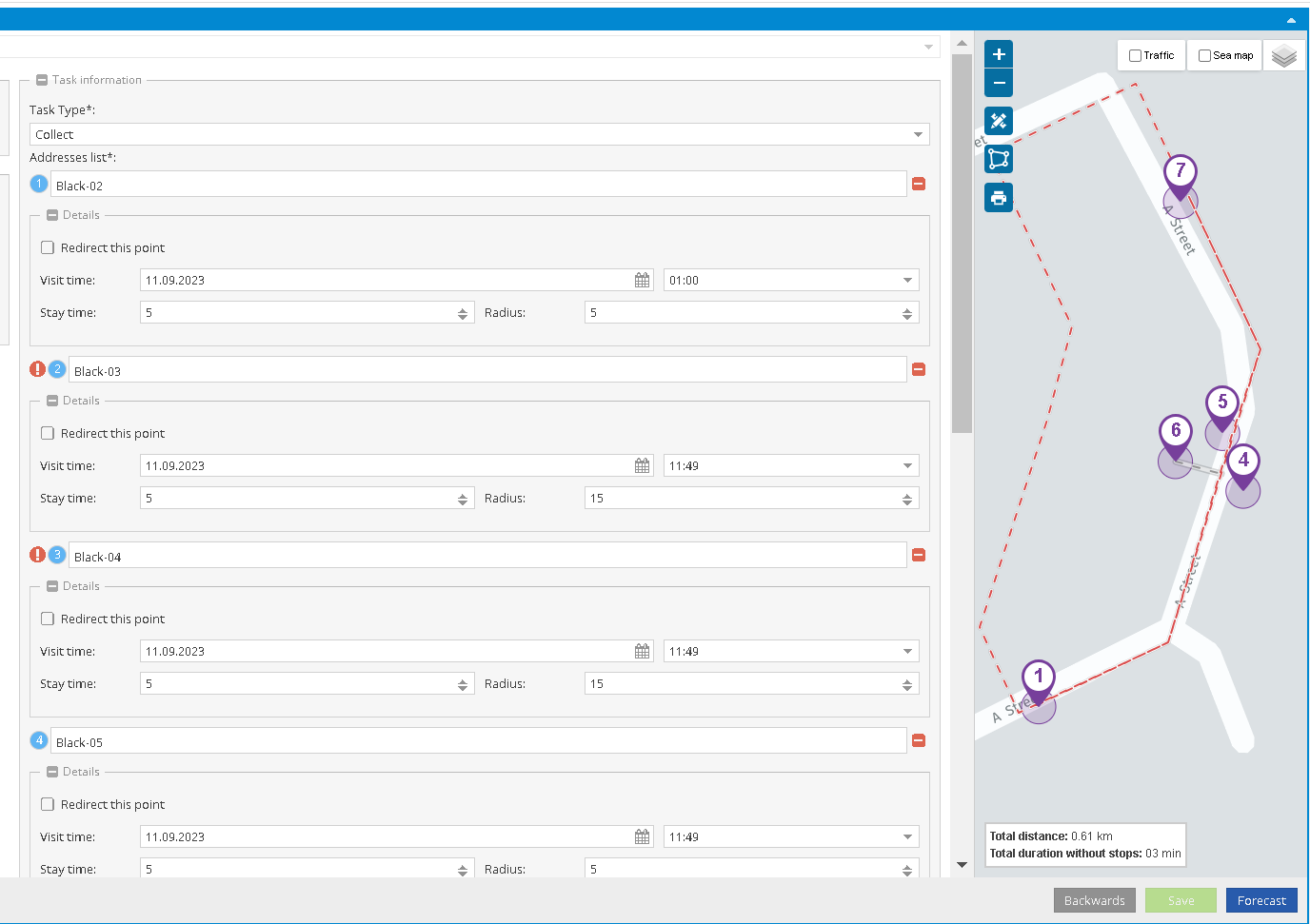
Further data on the completion of the garbage collection task can be tracked in the PTM module.
The PTM module in this case is intended for viewing, not creating tasks.
Create a task for Logistics
To create tasks, you must select the second menu Create a task in Logistic.
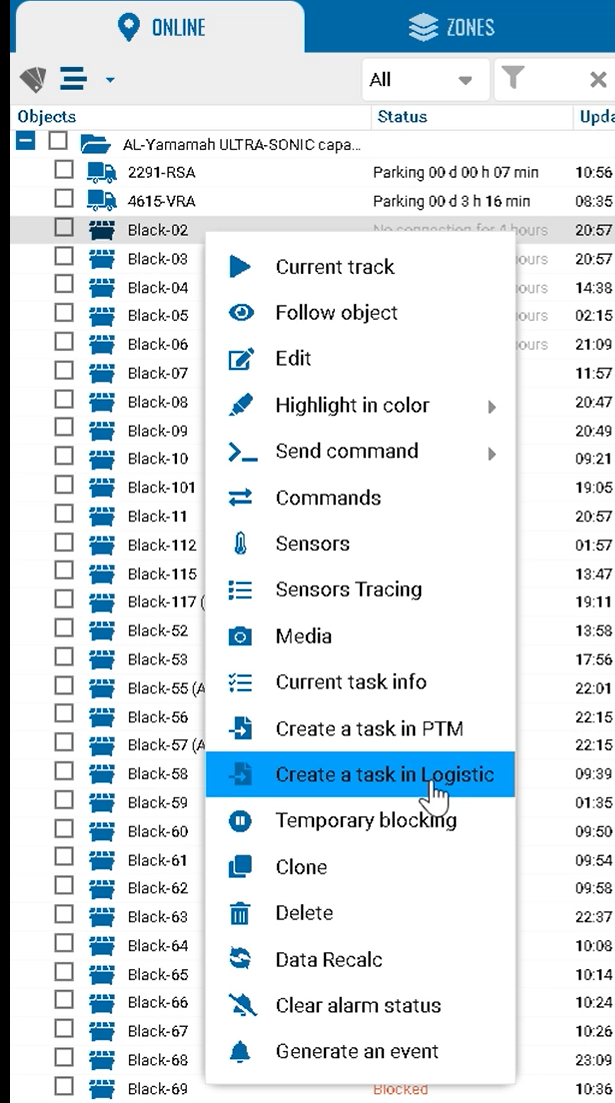
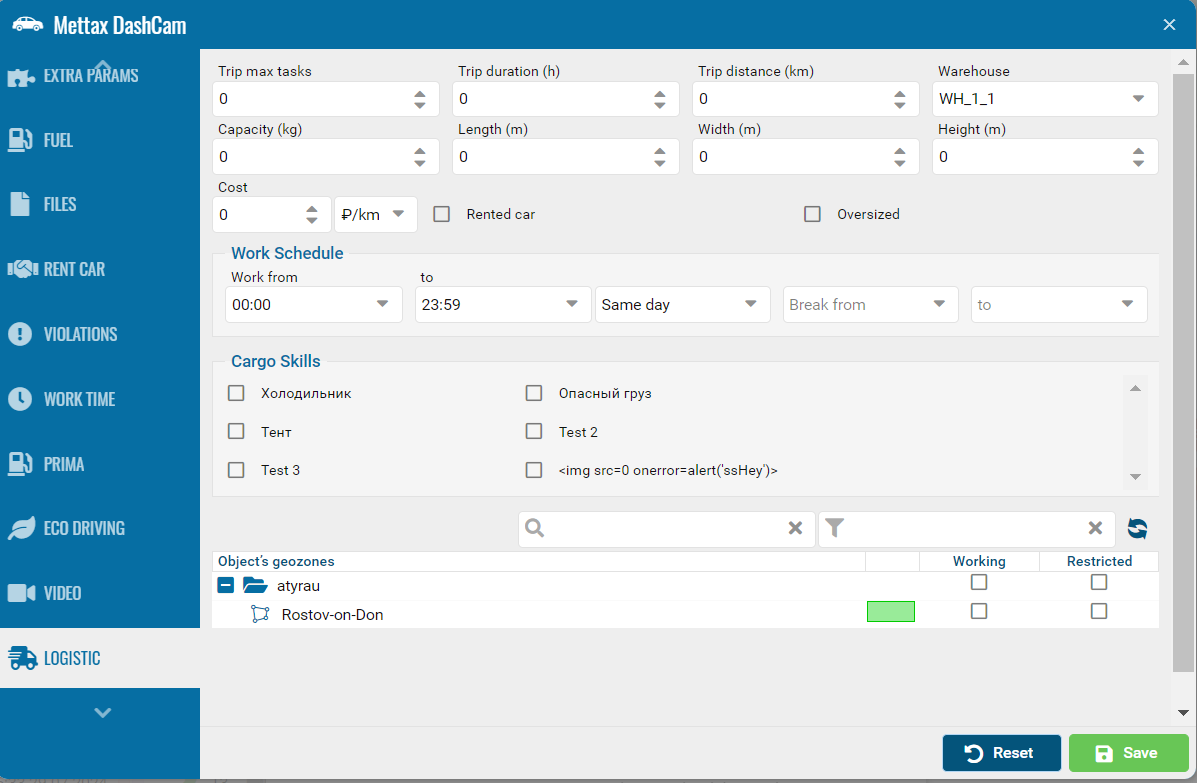
It is important to note that the Logistics module takes into account the settings from the facility’s work schedule and takes into account the warehouse operation settings.
Setting the scheduled time for garbage collection.
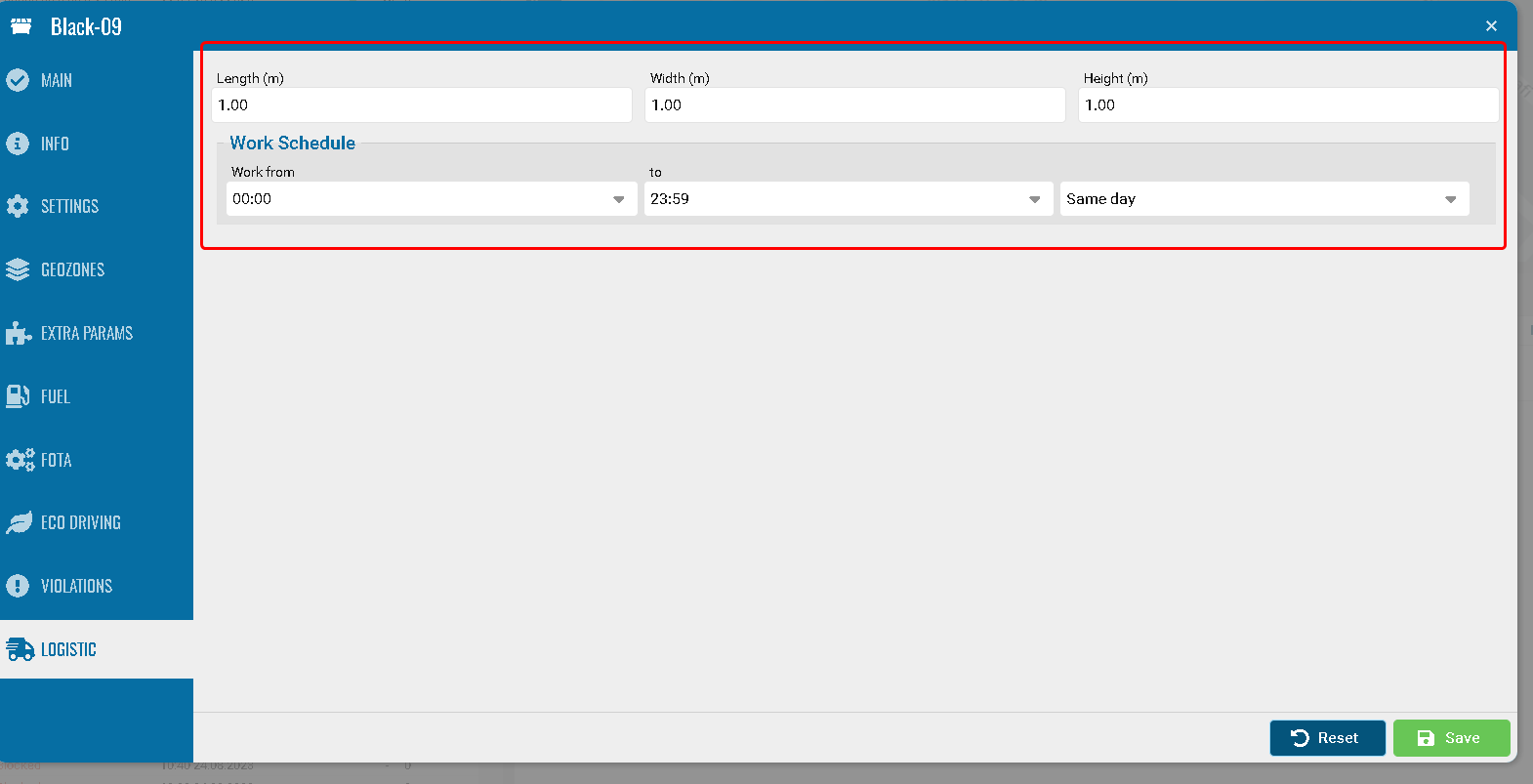
For objects, you should also fill in the parameters for Logistics.
There is no provision for creating a task in Logistics; a garbage collection task is created only from the context menu, as shown above.
Created tasks can be found through the date filter.
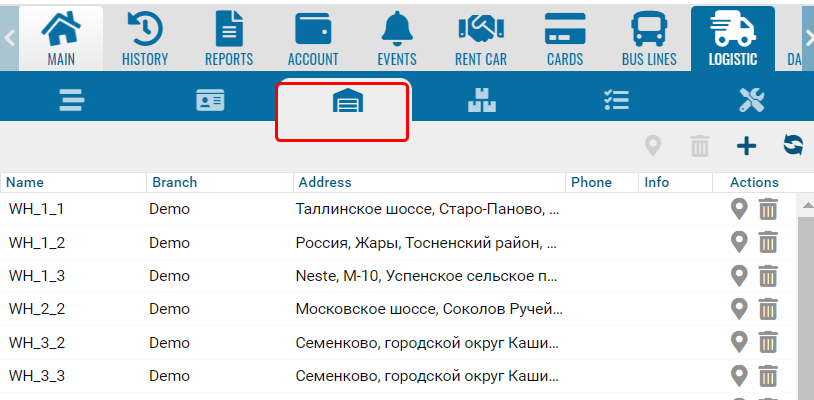
Window for creating a landfill address in the Logistics module.
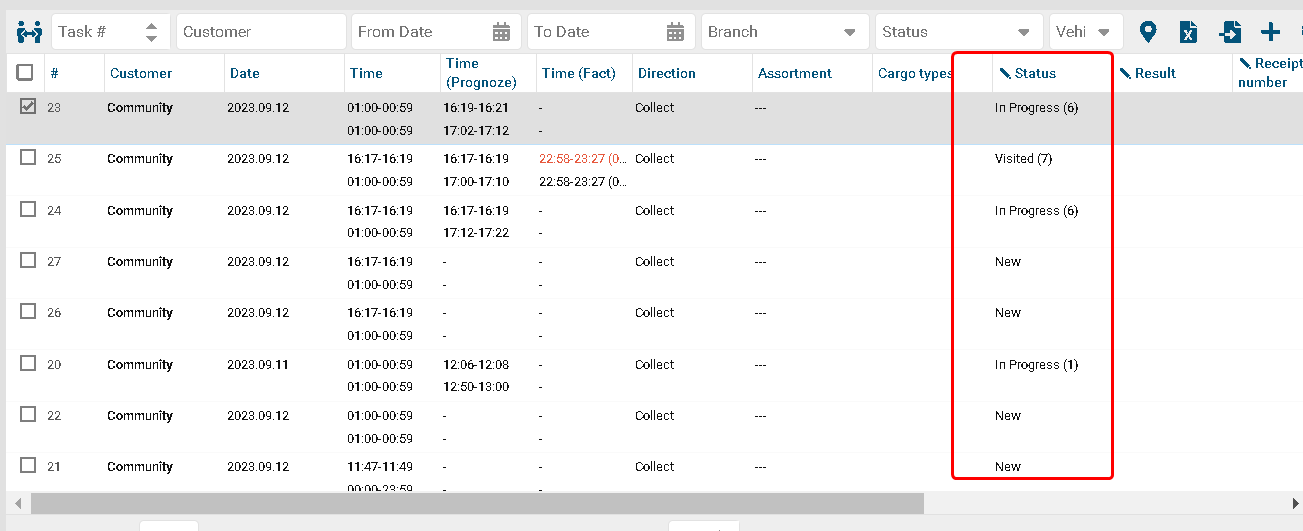
Application processes are displayed in the Status column.
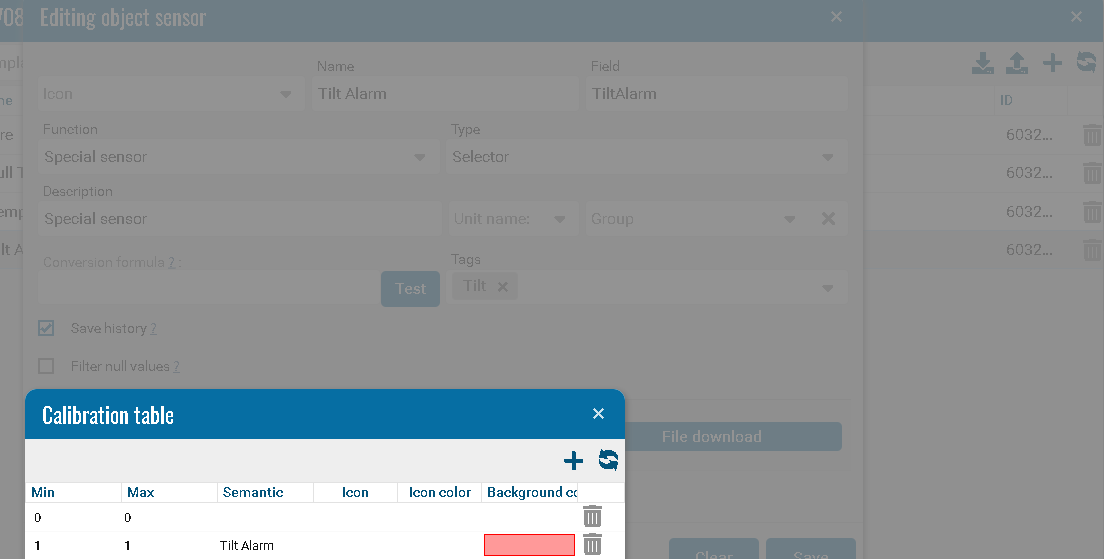
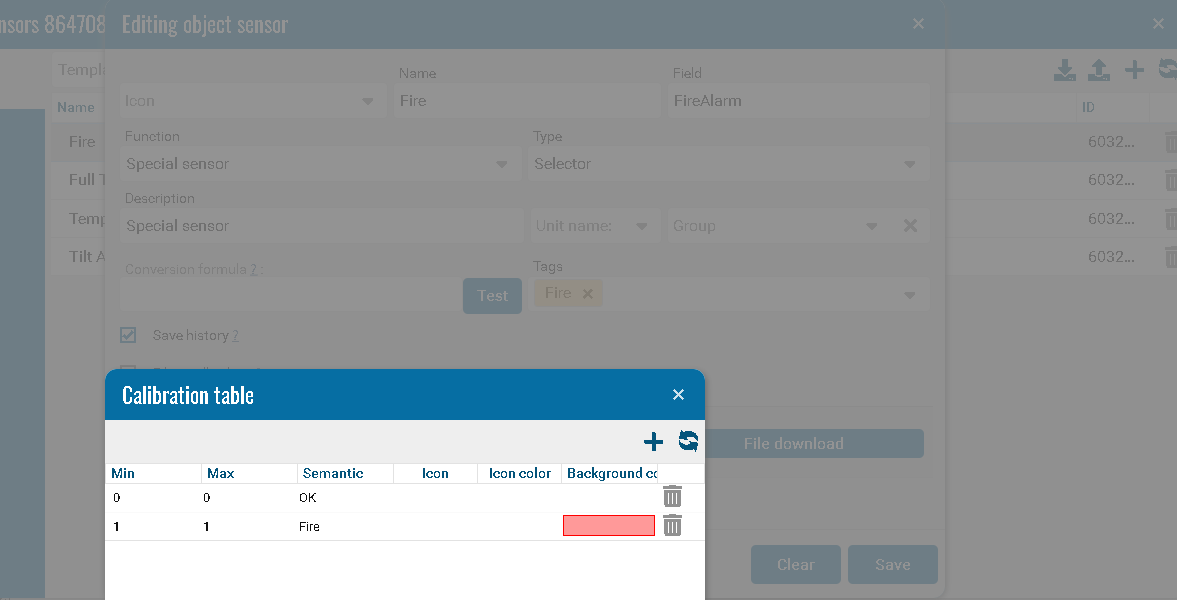
An example of using and configuring sensors.
1. Fire
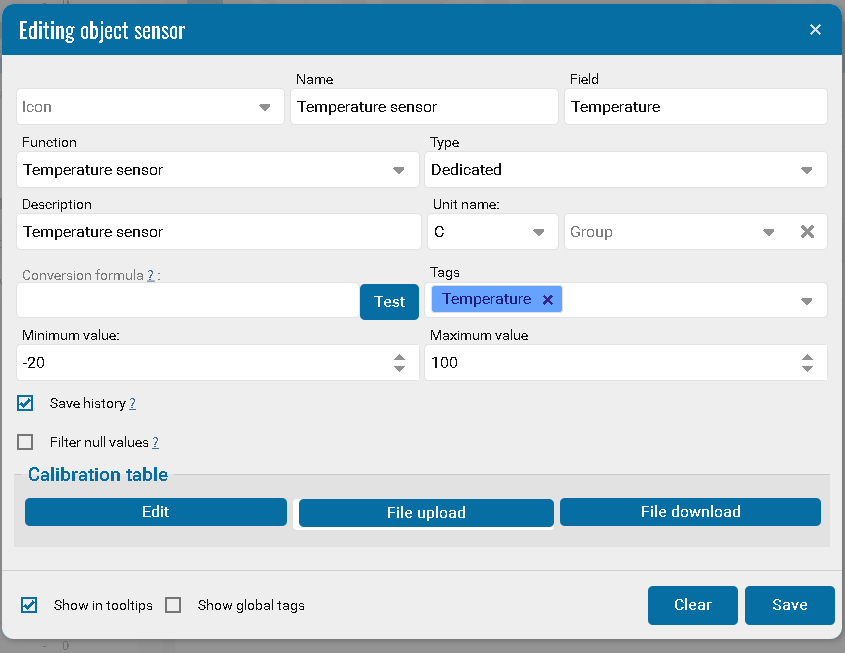
2. Temperature sensor
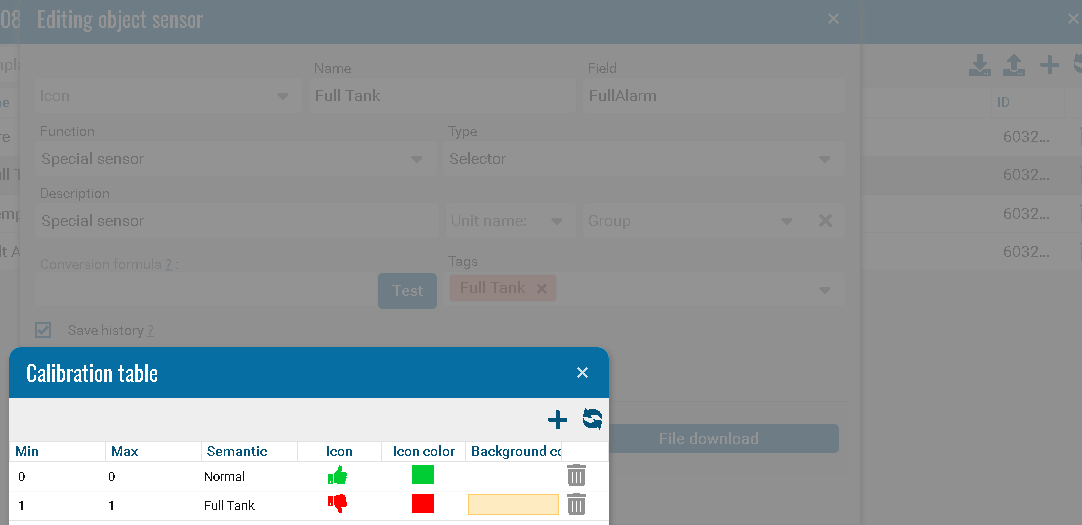
3. Full Tank
4. Tilt Alarm