Integration with RIYADH Municipality
This guide explains how to set up the integration that sends GPS tracker data from the PILOT system to an external WMS platform, using the RIYADH Municipality protocol.
The setup includes two main steps:
1. Relay configuration in the PILOT Admin panel
2. Sensor configuration for devices
-
Set up data relay in the Admin panel
-
Log in to the Admin panel
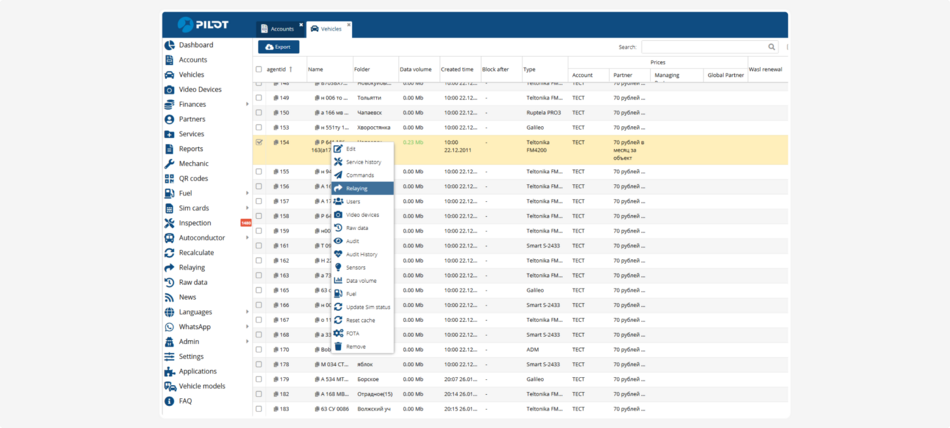
2. Go to the "Vehicles" tab
3. Find the vehicle you want to configure, right-click on it and select "Relay" from the menu
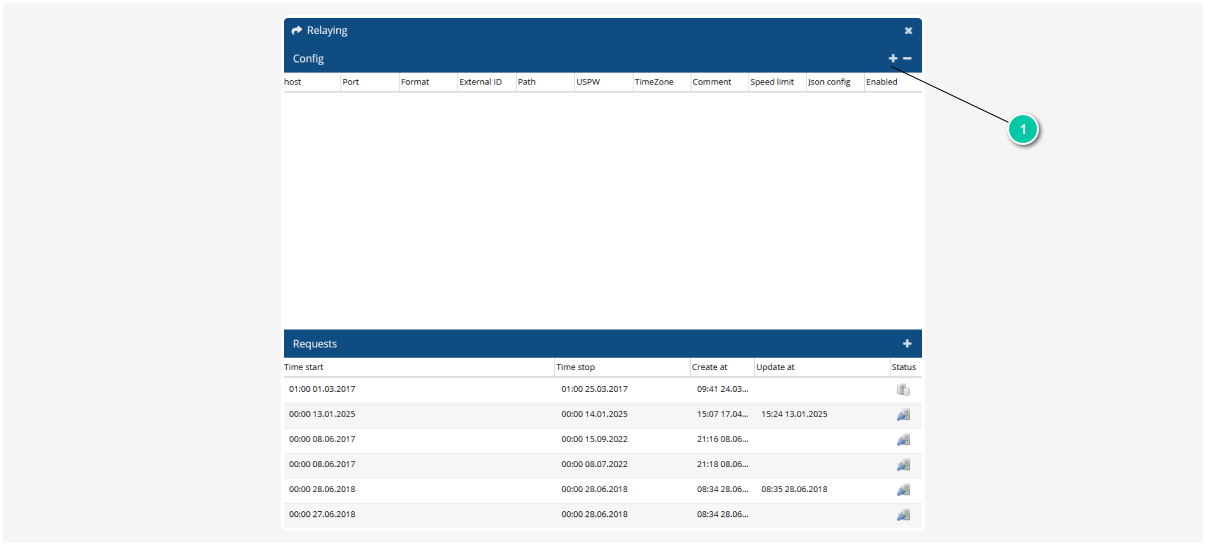
4. In the opened window, click the add relay button 
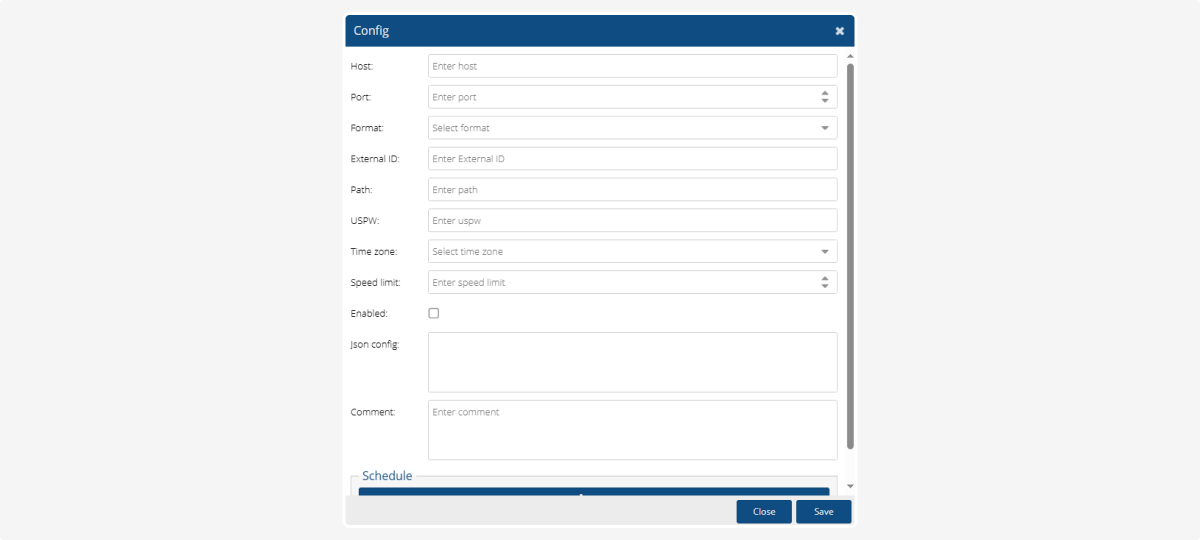
5. Fill in the relay configuration fields:
|
Field
|
Description
|
Value or example
|
|
Host
|
Destination server address (IP or domain)
|
admin-dev-wms.iotsquared.io (from protocol)
|
|
Port
|
Port number for data transmission
|
443
|
|
Format
|
Relay format
|
Select RIYADH municipality
|
|
External ID
|
Device identifier (usually IMEI)
|
Enter the IMEI of the GPS tracker
|
|
Path
|
API request path with x-token
|
/api/v1/integrations/http/${httpid} (where ${httpid} is an x-token)
For example, /api/v1/integrations/http/32fc9bec-967839-467890-56a0
|
|
Time zone
|
Time zone used for the data
|
UTC
|
|
Speed Limit
|
Speed limit (km/h)
|
0
|
|
Enabled
|
Relay activation status
|
Check the box to enable
|
|
json config
|
Additional parameters in JSON format
|
Please provide the partner's name
|
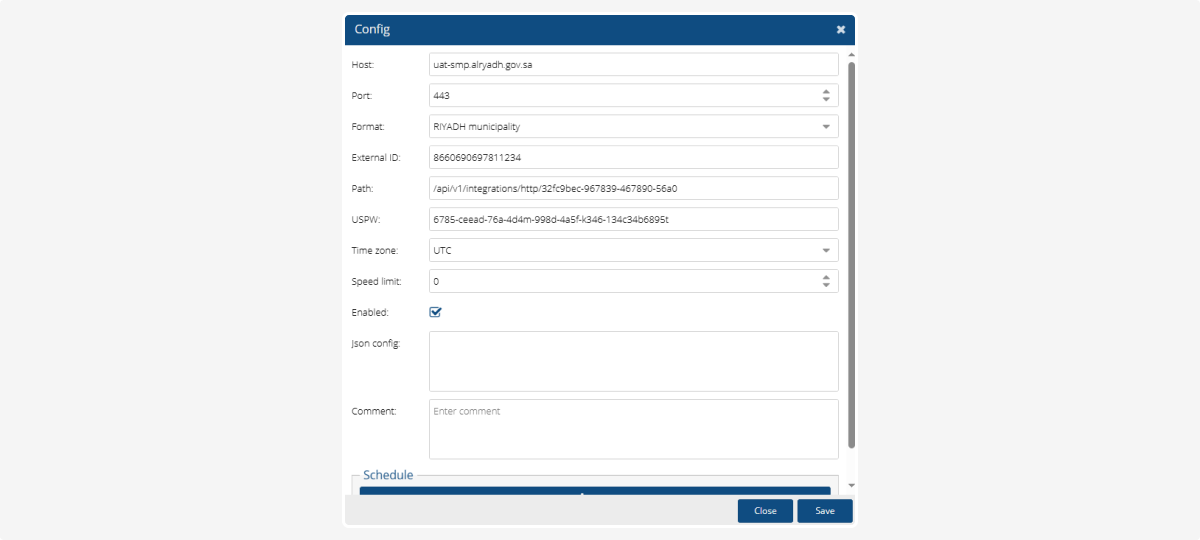
Example configuration
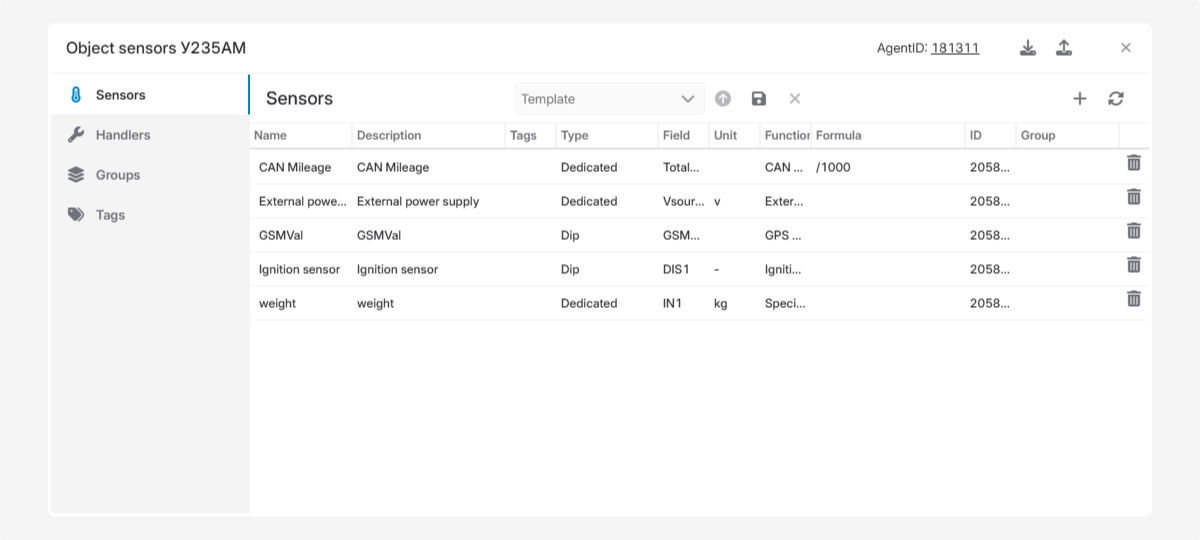
2. Configure required sensors for the vehicle
To ensure proper data transmission to the WMS platform, you must configure the following mandatory sensors on the vehicle:
- GPS antenna sensor**
- CAN odometer sensor (for mileage)
- Weight sensor
Enabling the CAN odometer for Teltonika devices
To enable mileage data transmission via the CAN bus, follow these steps:
-
In the Admin Panel, go to the "Vehicles" tab
2. Find the vehicle, right-click on it, and select "Commands"
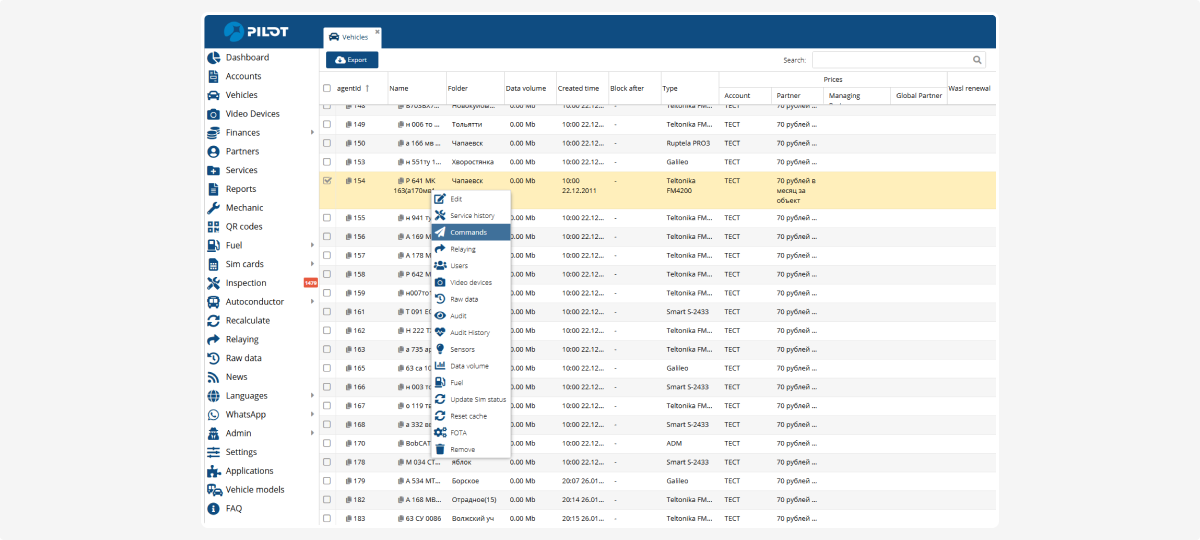
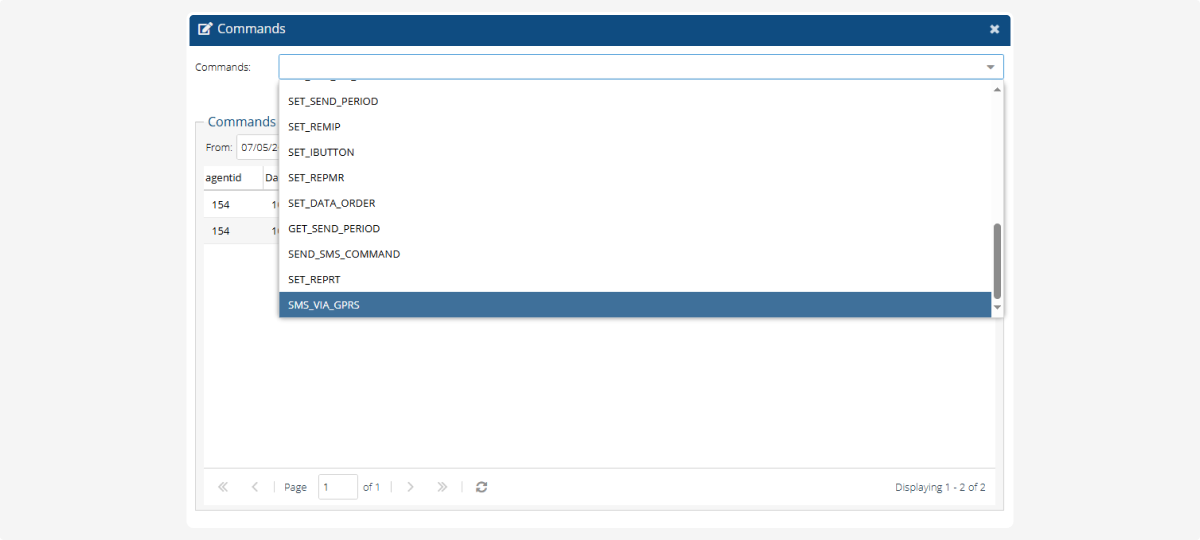
3. In the сommands window, select a command from the drop-down list.
5. Specify the command parameters and click the "Send" button.
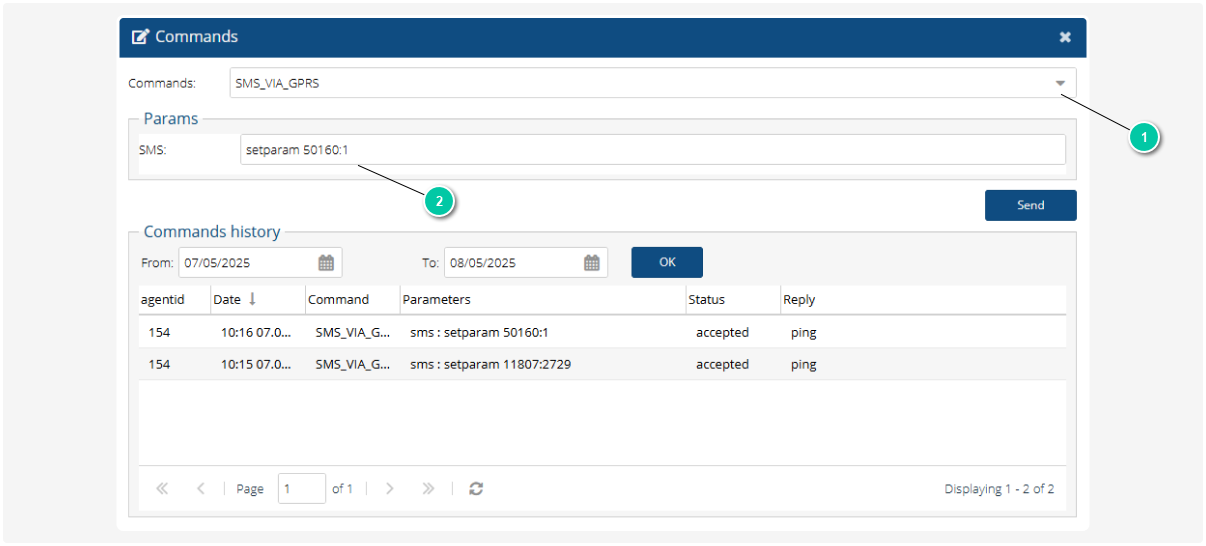
1 — Open сommand list
2 — Specify command parameters
-
setparam 50160:1 — enables CAN odometer data transmission
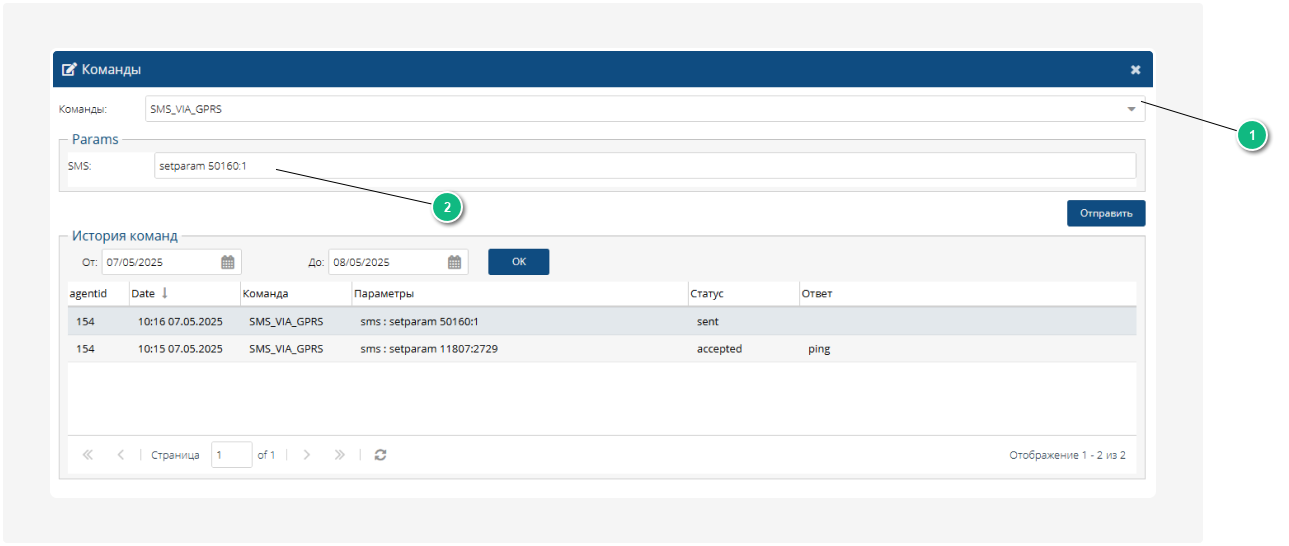
To set an initial mileage value (not starting from zero), you can use the following command:
-
setparam 11807:[value]— sets initial mileage (in km)
Where [value] is the desired initial odometer reading in kilometers. Example, if you want to set the mileage to 2729 kilometers, the command would look like this: setparam 11807:2729.
These commands configure the Teltonika device to receive mileage data via the vehicle's CAN bus. Once configured, the mileage will be automatically transmitted to the system.