Settings
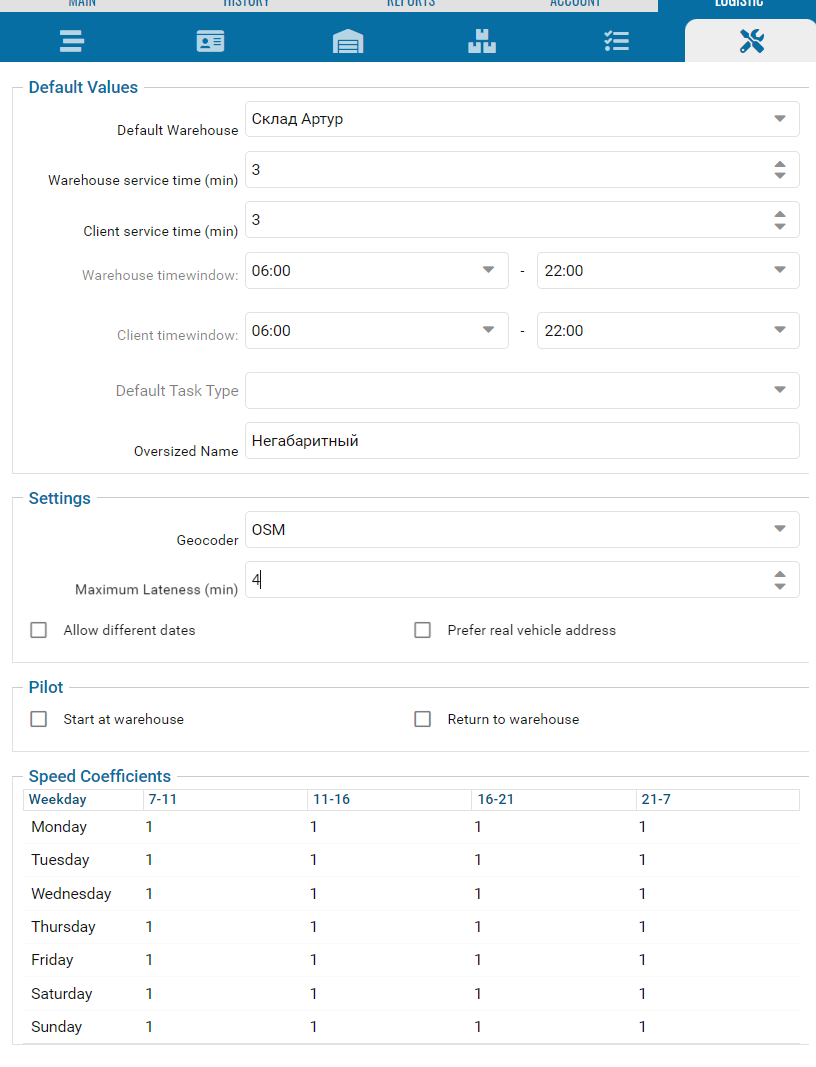
In the Settings section, administrators can configure PTM system parameters, set up integrations with external services, and define the system's default behavior.
The following sections describe all available settings.
Below is an overview of the available settings.
Geographic information system (GIS) integration
This section is used to configure mapping services that are responsible for address handling, geocoding, and travel time calculations.

1. Connecting mapping services
You can use services such as OSM, DaData, Google, HERE, Yandex, City Guide, and others.
For each service, specify:
-
Host, API key, or Token
-
Checkboxes:
-
Use for Geocoding — the service will be used to search for addresses and coordinates.
-
Use for Forecasting — the service will be used to calculate travel time and route forecasts.
2. Geocoding priority
Configure the order in which services are queried. The service with the highest priority will be used first.
3. Map layers
Select which map providers (OSM, Yandex, Google, etc.) will be available in the system.
4. Forecast parameters
Configure the parameters used to calculate estimated travel time:
-
Average speed
-
Average loading/unloading time
-
Maximum driving time
Calendar settings
This section controls how tasks are displayed in the calendar.
1. Color grouping
-
By task type — tasks are displayed in different colors depending on their type (for example, delivery, maintenance, etc.).
-
By vehicle — tasks are displayed in different colors depending on the assigned vehicle.
2. Enable the display of only active tasks
When enabled, the calendar displays only tasks with the following statuses:
-
New
-
In queue
-
Unassigned
-
Sent to driver
-
Accepted
-
En route
-
In progress
-
Pending approval
Task settings
These settings define how your dispatching system behaves.
1. Requests
You can specify a request repository and a request template:
-
Request repository — a request directory obtained through PARUS API integration. It is used to match requests with tasks in PTM.
-
Request template — a predefined template used for grouping and processing related tasks.
2. Color highlighting
Configure how tasks are highlighted in tables and calendars:
-
By task type — each task is assigned a color based on its type (for example, delivery, maintenance, etc.).
-
By user — the color depends on the user responsible for the task. User colors are configured in the user profile.
3. Closure reasons
You can require users to select a cancellation reason from a predefined directory when canceling a task.
4. Geofence-based auto statuses

Auto statuses allow tasks to change status automatically based on visits to route geofences.
-
Geofence radius, m — radius of the virtual geofence automatically created around a route point
-
Geofence accuracy, m — additional value added to the geofence radius during task processing
-
Start delta time, min, min — defines how many minutes before the planned start time a task can automatically enter processing
-
End delta time, min , min — defines how many minutes after the planned completion time a task may be automatically completed
-
Check-in time: Parking time, min; Time to mark arrival, sec; Time to mark departure, sec — minimum time a vehicle must remain inside a geofence for the visit to be recorded. This check applies to both entering and leaving the geofence
-
Enable сircular кoutes — allows proper processing of routes where vehicles repeatedly travel between the same points before returning to the base
-
Completion function — defines the condition used to automatically complete a task. Available completion functions
— Return to Base — the task is completed when the vehicle is detected again within the base geofence
The base can be:
-
The first route point
-
The last route point if it matches the first point
-
A route point with the Base subtype
-
An alternative geofence created in the PILOT system
— Complete by shift —the task is completed after the calculated processing time expires: Planned completion time + Finish After value
— Last route address (Geofence entry) — the task is completed when the vehicle enters the geofence of the last route point.
— Last route address (Geofence exit) — the task is completed when the vehicle leaves the geofence of the last route point.

These settings provide additional automation and task handling rules.
-
Enable for task auto-completion — forcibly completes tasks after a specified number of minutes following the planned completion time. It is not recommended to use this option together with auto statuses.
-
Task execution time — used when calculating the planned completion time if the duration field is not available for manual editing.
-
Enable sending unassigned tasks to all drivers — allows drivers to independently select tasks from the mobile application's shared task queue.
-
To enable task editing in the table only for the current day — restricts direct task editing in the task table to the current day only. Works together with user permissions and applies only to dynamically generated task tables.
-
Enable the autocomplete task by key fields — automatically fills task data using information from previously created tasks based on entered values.
-
Disable selection of system task types — hides service task types from users when creating tasks.
-
Turn on task status highlighting — highlights status cells according to the current task status.
-
By default the initiator in the current user — automatically assigns the current user as the initiator when creating a task.
-
Enable tooltips for table rows — displays brief task information when hovering over table rows.
-
Close task after signing — automatically closes a task after the entire approval and signing workflow is completed.
-
Turn waypoints on bypassing autostatuses — creates route points based on the planned route regardless of auto-status processing.
-
Enable the use of geofence priority for route points — if a route point is linked to a PILOT geofence, that geofence will be used as the primary geofence for visit detection.
-
Do not use the first point as the last point — disables automatic route closure and affects route sheet generation.
-
Enable the selection of the vehicle for replacement — allows assigning a backup vehicle without changing the primary vehicle assigned to the task.
-
Enable synchronization of address editing with the Address classifier — automatically updates the address directory when an address is modified within a task.
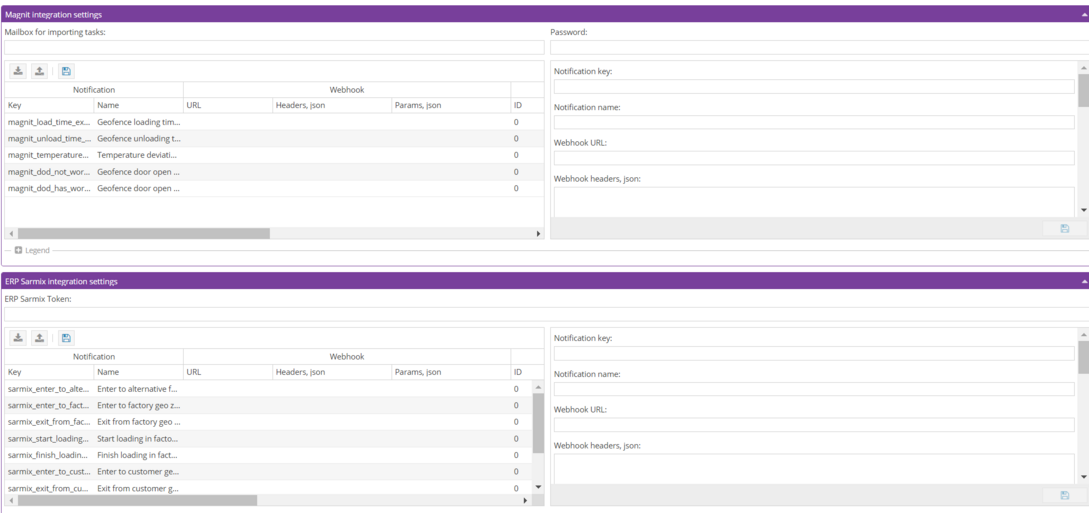
Integrations
Integration with external services allows the system to exchange data with other platforms.

You can:
1. Connect external services
2. Configure automatic data import and export via API, email, or webhooks
3. Define which events and data should be exchanged between systems
Integrations are used for:
-
Creating notifications
-
Automatically importing tasks from email using predefined templates (for example, the Magnit integration).
To configure an integration:
1. Select an integration group
2. Select an integration system
3. Fill in the required connection settings
If only notifications are used, the Magnit integration requires only an email address without a password.
Webhook settings
Each integration supports the following parameters:
-
Webhook URL — destination URL for webhook requests
-
Webhook headers — additional HTTP headers, such as authorization tokens
-
Webhook parameters — payload data sent in the webhook request
To automatically insert values, special functions can be used:
-
fn[getApiKey]— get the API key from the configuration (ERP Sarmix only)
-
fn[getAgentId]— get the vehicle ID from the PILOT system
-
fn[getCurrentAgentLocation]— get the vehicle's current location
-
fn[getCurrentUTC]— get the current vehicle packet timestamp in seconds
-
fn[getCurrentZoneId]— get the ID of the geofence where the vehicle is located
-
fn[getTaskId]— get the ID of the task currently being executed
-
fn[getErpOrderId]— get the request ID (ERP Sarmix only)
-
fn[getCurrentSpeed]— get the vehicle's current speed
-
fn[getVehicleNumber]— get the vehicle registration number
Example of webhook parameter configuration
In the Webhook parameters field, specify a JSON object containing the data to be sent to the external system. Special functions are used to automatically substitute values.
{
"access_token": "fn[getApiKey]",
"agent_id": "fn[getAgentId]",
"geolocation": "fn[getCurrentAgentLocation]",
"time_event": "fn[getCurrentUTC]",
"zone_id": "fn[getCurrentZoneId]",
"pilot_task_id": "fn[getTaskId]",
"erp_order_id": "fn[getErpOrderId]",
"speed": "fn[getCurrentSpeed]",
"vehiclenumber": "fn[getVehicleNumber]"
}
|
The system will automatically replace the functions with actual values, for example:
{
"access_token": "123456789abcdef",
"agent_id": "4521",
"geolocation": "55.751244,37.618423",
"time_event": "1750054800",
"zone_id": "125",
"pilot_task_id": "98765",
"erp_order_id": "ORD-4567",
"speed": "68",
"vehiclenumber": "A123BC777"
}
|
Additional integration parameters
Algorithm ID — the identifier of an algorithm created in the PILOT system for operator notification processing.
Algorithm data — a payload passed to a PILOT algorithm when a notification is triggered. This configuration is typically performed by technical support when required. The structure depends on the specific algorithm and processing scenario.
Example of algorithm data configuration
{
"-6": {
"text": "Perform the required actions",
"options": [
"Action 1",
"Action 2",
"Action 3"
]
}
}
|
Additional parameters:
-
Algorithm timer — timeout value for the algorithm in seconds.
-
Sensor ID — identifier of a sensor in the PILOT system.
-
Email addresses — list of email addresses that will receive notifications.
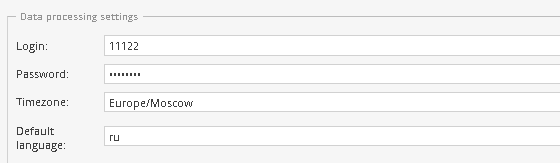
Account settings
Configure system-wide settings for your account.

1. Mobile app task queue
Enable the task queue for drivers and choose whether:
-
Drivers select tasks themselves
-
Tasks are assigned automatically
2. Profile and integration settings
-
Set login and password
-
Define default system time zone and language
-
Enable ExactFarming integration and configure the token
3. “Logistician – Dispatcher” workflow
Enable the workflow chain and select permission templates for logisticians and dispatchers.
4. Mobile interface
Enable the new mobile interface and configure automatic generation of driver reports.
5. Message sending
Configure notifications sent to task initiators and drivers when needed.
6. System event notifications
Set up alerts for system issues such as:
-
Geocoding errors
-
Missing vehicles or tracks
-
Invalid time ranges
-
Geofence overlaps
-
Track gaps